EasyDelta: Industrial Programming by Example
In the two-semester project group “Industrial Programming by Example” (InProX) at TU Dortmund Cinco was utilized to develop “EasyDelta”, a graphical DSL tool for the model-based programming of Delta robots (industrial robots specialized on very fast “pick and place packaging” operations).
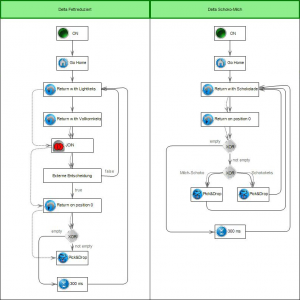
Usually, the PLC (programmable logic controller) controlling the delta robots’ movements is programmed with one of the low-level programming languages defined in the IEC 61131 standard, such as Structured Text or Ladder Diagrams. With EasyDelta on the other hand experts for packaging operations, who are usually not specially trained PLC programmers, are enabled to specify multiple delta robots’ decisions on which items to pick from a conveyor belt in an abstract way. The graphical DSL comprises various modeling components to express this decision process, for instance based on type of items to pick, item characteristics (not specific to a single item type), or items’ positions on the conveyor belt (e.g. regarding coordinates or abstract features like ‘clustered with other items’). Furthermore, the packaging scenario (i.e., number of delta robots or item types/characteristics) is also modeled. A code generator then fully automatically transforms the models into executable code for the PLC. The project was supported by the packaging automation specialists from Omron Europe B.V. (Barcelona and Düsseldorf) who also provided one of their NJ Controllers to deploy and run the generated code under realistic conditions.
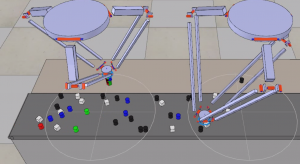
The second phase of the project aimed at the automatic inference of those decision processes on the basis of examples provided by a user within a V-REP simulation environment. Here, Cinco‘s simple transformation API was used to insert the results from a third party decision tree learning algorithm as modeling components into the EasyDelta tool.
The final report from the project is available at the TU Dortmund publication repository (German only).
For questions regarding the project, please contact Philip Zweihoff.